plan_mtc_task.hpp File Reference
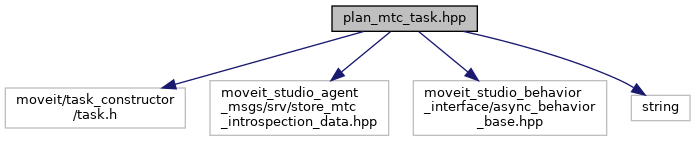
#include <moveit/task_constructor/task.h>#include <moveit_studio_agent_msgs/srv/store_mtc_introspection_data.hpp>#include <moveit_studio_behavior_interface/async_behavior_base.hpp>#include <string>
Include dependency graph for plan_mtc_task.hpp:
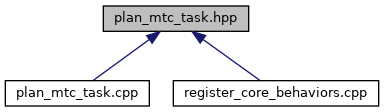
This graph shows which files directly or indirectly include this file:
Classes | |
| class | moveit_studio::behaviors::PlanMTCTask |
| Takes a shared pointer to an existing MTC Task object via an input data port, plans the Task, and sets the solution with the lowest overall cost as an output data port. A service client sends over all the solutions to the MTC Solution Manager node which can be used for debugging. More... | |
Namespaces | |
| moveit_studio | |
| moveit_studio::behaviors | |
Typedefs | |
| using | moveit_studio::behaviors::StoreMtcIntrospectionData = moveit_studio_agent_msgs::srv::StoreMtcIntrospectionData |